Szenzorok
A vezetéstámogató rendszerek 3 fő szenzorra épülnek: kamera, radar és ultrahang. A valóságban adott esetben a vezetéstámogató rendszerek több szenzor együttes használatával működnek (a szoftverben ilyet nem kell megvalósítani).
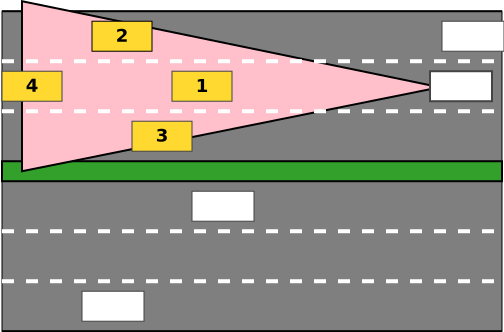
A jegyzetben szereplő ábrák a szenzorok látóterét nem méretarányosan mutatják mivel a radar és a kamera látótere túl nagy, így az igazán lényeges részletek elvesznének.
További olvasmány:
- Driver Assistance Systems, an introduction to Adaptive Cruise Control
- Sensor Set Design Patterns for Autonomous Vehicles
Kamera
A kamera a szélvédő mögött található, 60°-os látószöggel 80 méterre lát el. A táblafelismerő rendszer és a sávtartó automatika használja.

Radar
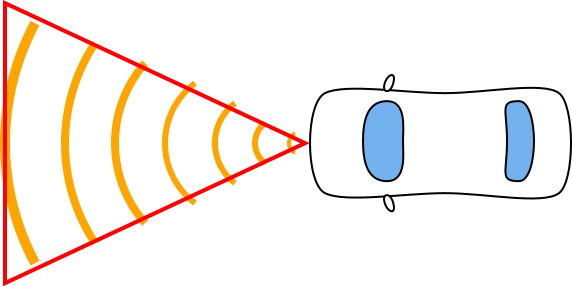
A radar az autó lökhárítóján helyezkedik el, 60°-os látószöggel 200 méterre lát el. Az adaptív tempomat és az autonóm vészfékező rendszer épül rá.

A valóságban a radar több járművet is azonosít. A azonos sávban közvetlenül előtte haladót, a szomszédos sávokban haladó autókat és a képes az azonos sávban haladó előttit is azonosítani (az autó alatt átverődő jelekkel). Ennek köszönhetően az olyan potenciálisan veszélyes manőverek mint a szomszéd sávból elénk bevágó autó is felismerhető mivel folyamatosan figyeli ezek helyzetét.
Ultrahang
Az ultrahang szenzorból 8 darab van az autón, látótávolsága 3 méter, látószöge 100°, a parkoló asszisztens és a tolatóradar épül rá.

Szenzorimplementáció működése
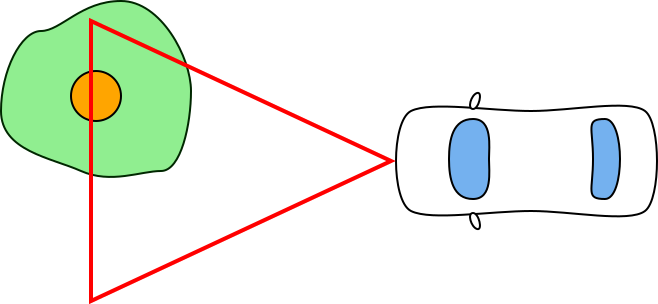
A valóságos szenzorokhoz képest az implemtálandó szenzorok jelentősen egyszerűbbek. Értelem szerűen nem kell sem radar, sem ultrahang jeleket szimulálni és a szenzorok látóterét is jelentősen egyszerűsítve reprezentáljuk: egy háromszöggel.
A szenzor látóterét jelképező háromszög a vezérelt autóhoz van rögzítve, vele együtt mozog. Ez az a háromszög amely kijelöli a világ egy szeletét és elérhetővé teszi a szenzornak feldolgozásra. Maga a világ (World osztály) singleton, pontosan egy létezik belőle amelyhez bármely szenzor közvetlenül hozzáfér.
A világ tartalmaz egy WorldObject objektumokból álló gyűjteményt, amelyben minden statikus és dinamikus objektum megtalálható, beleértve a vezérelt autót is.
Az első sprint során a modellező csapat implementál egy lekérdező metódust, amely egy háromszöget (vagy 3 pontot) vár bemenetként és visszadja azon világ objektumok listáját, amelyek beleesnek ebbe a háromszögbe.
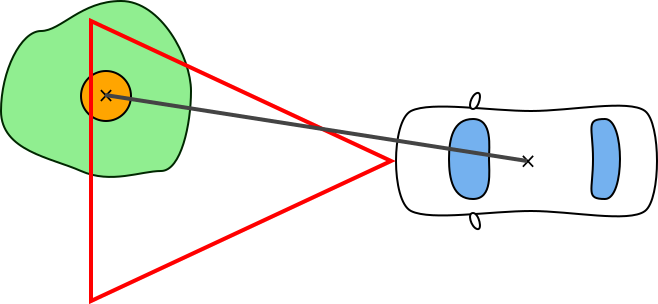
Ha a szenzor háromszög ugyanolyan poligonnal van megvalósítva mint a világobjektumok poligonjai, akkor az intersects metódussal könynen eldöntehető, hogy a szenzor látóterének háromszövgébe tartozik-e egy-egy világ objektum.
A szenzorok ez a listát tovább szűrik az alapján, hogy mire érzékenyek. A kamerára a sávtartóautomatika (LKA) és a táblafelismerő (TSR) épül, így annak a szenzornak az útelemek és a táblák relevánsak.
A radar és az ultrahang olyan objektumokra érzékeny, amelynek neki lehet menni, amivel az egocar ütközhet. Ezen kívül a radarra épülő ACC a vezérelt autó előtt (sávon belül) haladó autóra fókuszál, a vészfékező (AEB) bármire ami az egocar útjába esik. Az ultrahang szenzor szintén, csupán az rövidebb távon és a Parking Pilot használja.
Miután a szenzorokhoz konkrét objektum referenciák kerülnek, a szenzor hozzáfér az objektum minden tulajdonságához. Így akár könnyedén lehet számítani távolságot két objektum között (a referenciapontok segítségével).
A szenzorok a feldolgozásuk eredményét a Virtual Function Bus-ra írják packet objektumok segítségével. Aztán ezeket a megfelelő modulok kiolvassák és hasznosítják. Pl. a műszerfalon megjelenik a táblafelismerő által detektált tábla, vagy az AEB által generált vezérlésre a hajtáslánc modul fékezéssel reagál.